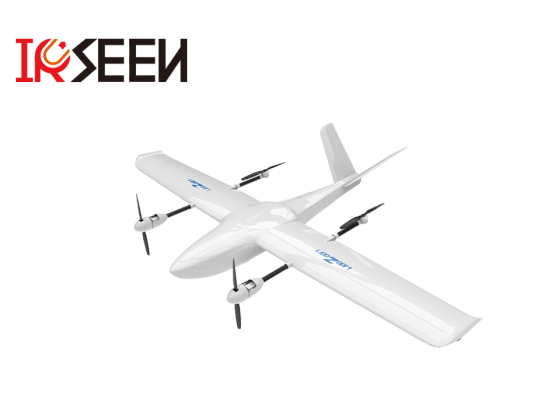
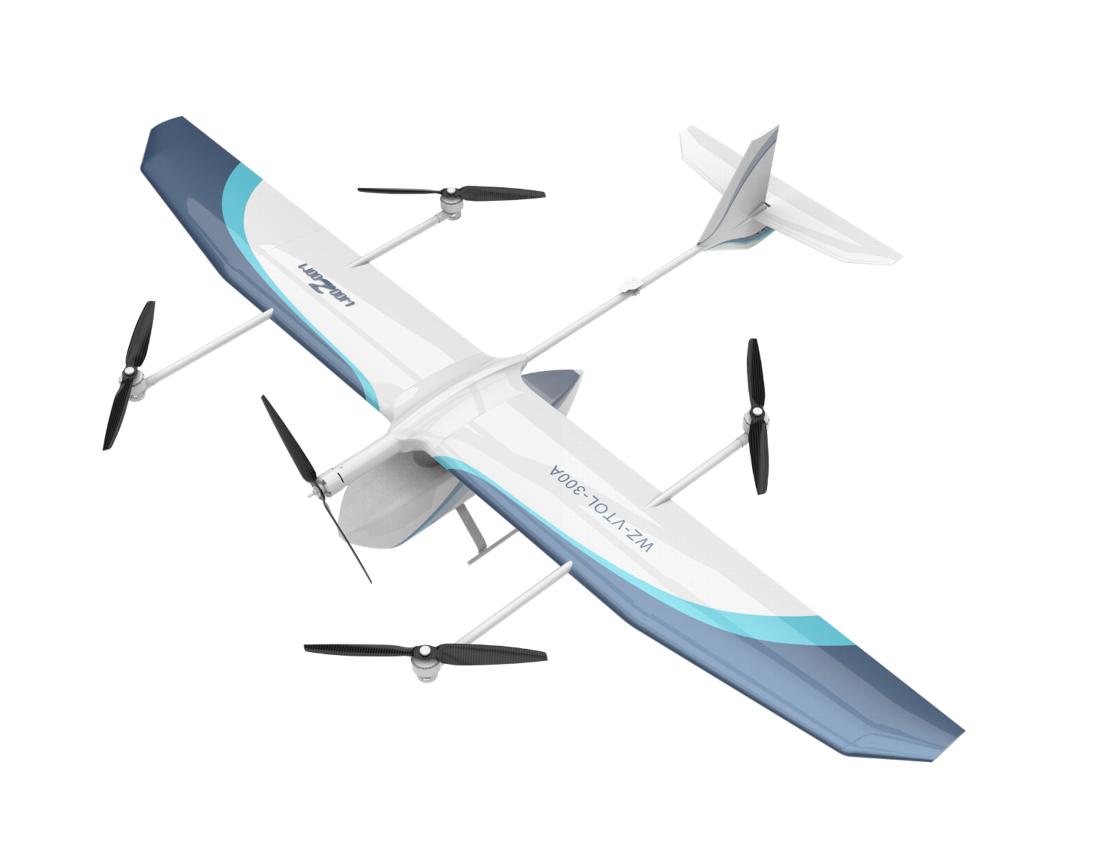
Décollage et atterrissage vertical électrique pur UAV-p6
Avec une meilleure structure et une conception aérodynamique, les drones de la série P ont d'excellentes performances de résistance au vent et peuvent supporter des charges allant jusqu'à 6 g après des tests en laboratoire ; La capacité de charge utile et d'endurance du drone électrique pur de classe 15 kg est la plus élevée.
- information
UAV à décollage et atterrissage vertical électrique pur
Introduction
Technologie aérodynamique de pointe avec
Excellent rapport portance-traînée
Nos ingénieurs ont appliqué des conceptions aérodynamiques avancées et des conceptions industrielles audacieuses, y compris la queue inversée fixée à l'avion comme train d'atterrissage, qui équilibre le poids de l'avion et assure un vol stable sous une charge maximale ; Le fuselage stratifié de la série P minimise la traînée aérodynamique et augmente considérablement la vitesse de croisière, augmentant le rapport portance-traînée à 21 (contre 18 sur un Boeing 747).
Lconstruction légère, force lourde
Avec une meilleure structure et une conception aérodynamique, les drones de la série P ont d'excellentes performances de résistance au vent et peuvent supporter des charges allant jusqu'à 6 g après des tests en laboratoire ; La capacité de charge utile et d'endurance du drone électrique pur de classe 15 kg est la plus élevée.
Une variété de charges, vous pouvez choisir
Les modules de charge utile que nous fournissons ont été repensés pour permettre un réassemblage rapide afin de répondre à différentes exigences. Il existe des modules photoélectriques, des caméras orthographiques, des caméras inclinables, des caméras multispectrales et des lidars.
paramètre
6Temps de navigation effectif (montage 1Kg)
400kmPortée maximale
100kmDistance maximale de transmission de données (30/60 en option)
7500mPlafond pratique
8kgCharge maximale
matériel | matérielqualité Tous les composites en fibre de carbone |
envergure | ≤3 m |
capitaine | ≤1 .9 m |
hauteur | ≤ 0,4 m |
Mode décollage et atterrissage | Décollage et atterrissage vertical autonome sans télécommande |
Masse au décollage | 18 kg ou moins |
Temps de vol | ≥6 h (portant une charge de 1 kg)/ ≥ 2,5 h (portant Lidar) |
Vitesse de croisière | 65km/h -150km/h |
Hauteur de plafond pratique | ≥ 7500m au-dessus du niveau de la mer |
Résistance au vent | Étage d'atterrissage du rotor 6, étage de croisière 8 au près, 6 vent de travers |
Température de fonctionnement | 20℃ au-dessous de zéro à 50℃ au-dessus de zéro |
Temps de réponse de la tâche | Déplier ≤3 min, retirer ≤3 min |
Charger le module | Type de cartographie prenant en charge le module d'enquête aérienne/module d'inclinaison/module de télédétection Lidar/multi-lumière Module de spectre, type de sécurité prenant en charge une lumière simple/double lumière/échange de trois lumières |

NETD est la différence de température équivalente au bruit de la caméra infrarouge, qui est l'un des principaux indicateurs des détecteurs infrarouges. NETD est un indice d'évaluation objectif de la sensibilité d'un système d'imagerie thermique et peut être utilisé pour prédire la distance de détection d'une cible ponctuelle à faible différence de température. La valeur NETD de la c...more