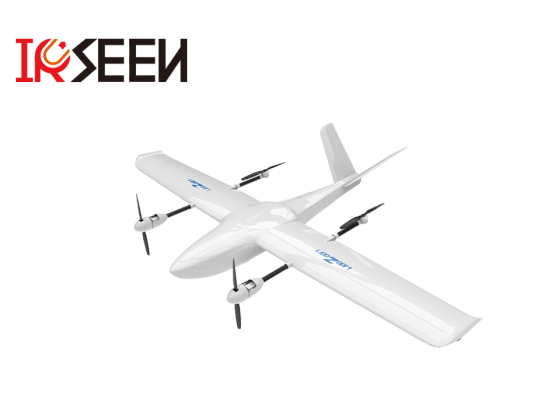
Multirotor vectoriel
Le drone multi-rotor est conçu avec une structure de fuselage extrêmement légère pour maintenir la résistance tout en économisant autant de poids que possible pour les charges de mission et les systèmes de batterie afin de prolonger le temps de fonctionnement inactif.
- IRSEEN
- Shenyang, Chine
- information
Multirotor vectoriel
Introduction
Le drone multi-rotor est conçu avec une structure de fuselage extrêmement légère pour maintenir la résistance tout en économisant autant de poids que possible pour les charges de mission et les systèmes de batterie afin de prolonger le temps de fonctionnement inactif.
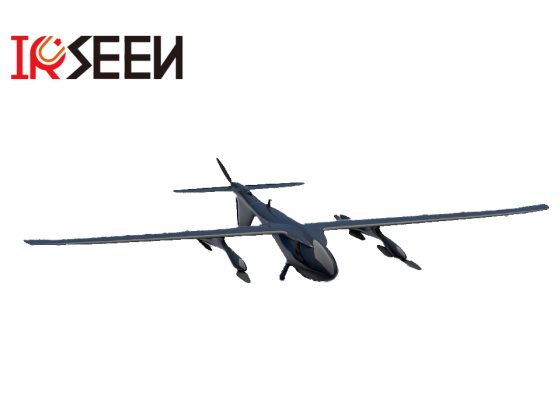
Le système UAV est principalement composé d'une plate-forme de vol UAV, d'un système de charge utile de mission, d'un système de station au sol et d'une plate-forme de gestion de données volumineuses en arrière-plan.
L'UAV est conçu sur la base du concept de conception modulaire, qui peut transporter de manière flexible différents équipements de mission aéroportés (tels qu'un module de caméra à une seule lumière, un module de nacelle à plusieurs lumières, etc.) à appliquer à différentes tâches et a la capacité de multi- demande de scène.
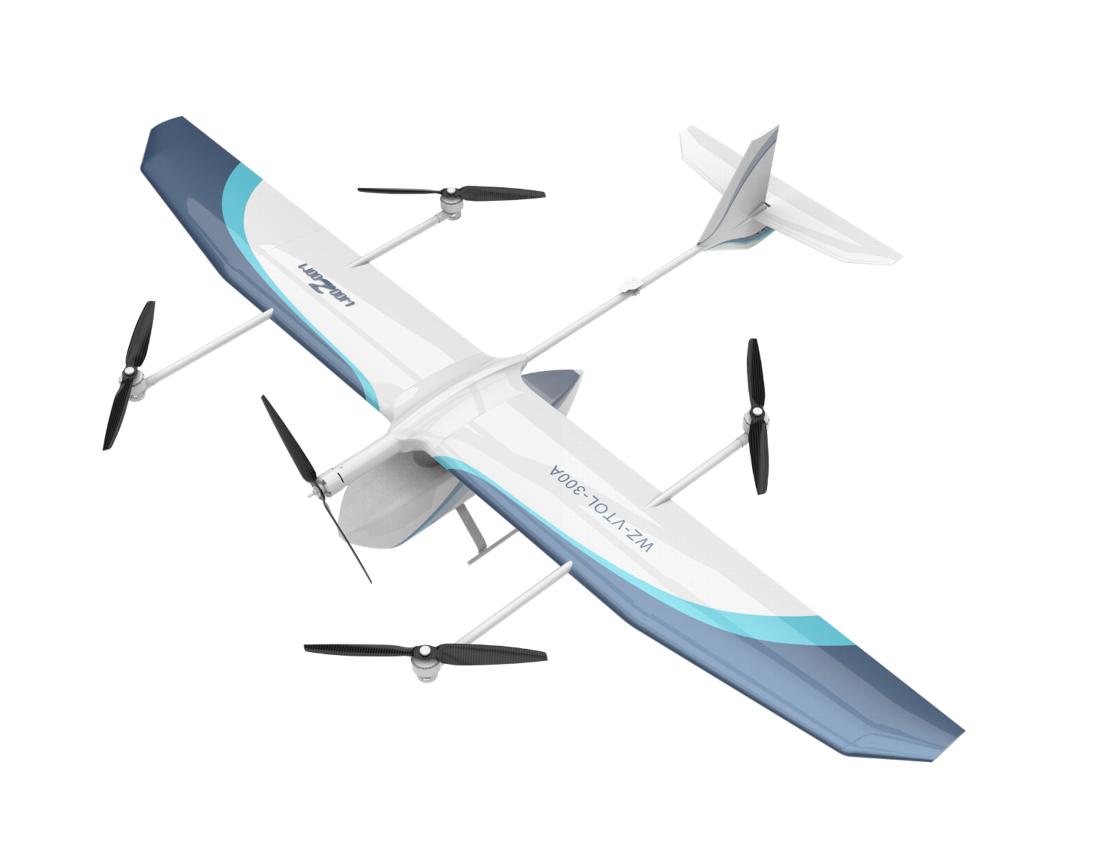
Il est de petite taille et léger et peut être transporté par une seule personne pour effectuer l'inspection de la zone de travail désignée.
Le drone est facile à utiliser, facile à installer, flexible, peut être déployé en peu de temps et peut être largement utilisé dans une variété de missions aériennes telles que la patrouille d'assaut, la reconnaissance et la recherche.
Les fonctions
Taille maximale 800*600*400(mm)
Charge de mission 5,2 kg
Temps de survol 44min
L'altitude maximale de vol est de 2000m
L'altitude maximale est de 5000m
Précision du vol stationnaire GPS vertical :±0,5 m horizontale±1,5 m
Paramètres
projet | paramètre |
Diamètre du rotor | 381mm |
Taille du corps | 800 mm * 800 mm * 295,1 mm |
Poids à vide | 4,5 kg |
charge utile | 2 kg |
Temps de vol maximal | 30 minutes |
Vitesse de vol maximale | 20m/s |
Altitude maximale | 4000m |
Rayon de la tâche | 5 km |
Précision du survol GPS | Vertical±0,5 m |

NETD est la différence de température équivalente au bruit de la caméra infrarouge, qui est l'un des principaux indicateurs des détecteurs infrarouges. NETD est un indice d'évaluation objectif de la sensibilité d'un système d'imagerie thermique et peut être utilisé pour prédire la distance de détection d'une cible ponctuelle à faible différence de température. La valeur NETD de la c...more